Introduction:
George Devol was a famous scientist and the first maker of an automatic door from the 20th century. We know him as the father of robotics; the first time introduced “micro-robotics” in history. After that, it became a proper field and now there is the world of robots, everywhere from a minor job to bigger work robots are working around. Now, this is the world of robots which is spreading more and more to work smarter and quicker. Let’s discuss the inventor and the history of Robotics Arm and robots.
| Basic Information | George Devol |
| Nationality | United States of America |
| Date of Birth | 20th February 1912 |
| Place of Birth | Louisville, Kentucky |
| Date of Death | August 11, 2011 |
| Place of Death | Wilton, Connecticut, |
| Cause of Death | Heart Ailment |
| Age | 99 years old |
| School | Riordan Prep school |
| High School / College | Local higher school |
| University | Not attended |
| Occupation | Business |
| Career | 1932 – 2011 |
| Famous for | Automatic door |
| Title | First automatic door maker |
| Other works | Laundry press machines, the field created “Micro-robotics” |
| Spouse | Evelyn Jahelka |
| Awards | Grandfather of Robotics |
George Devol:
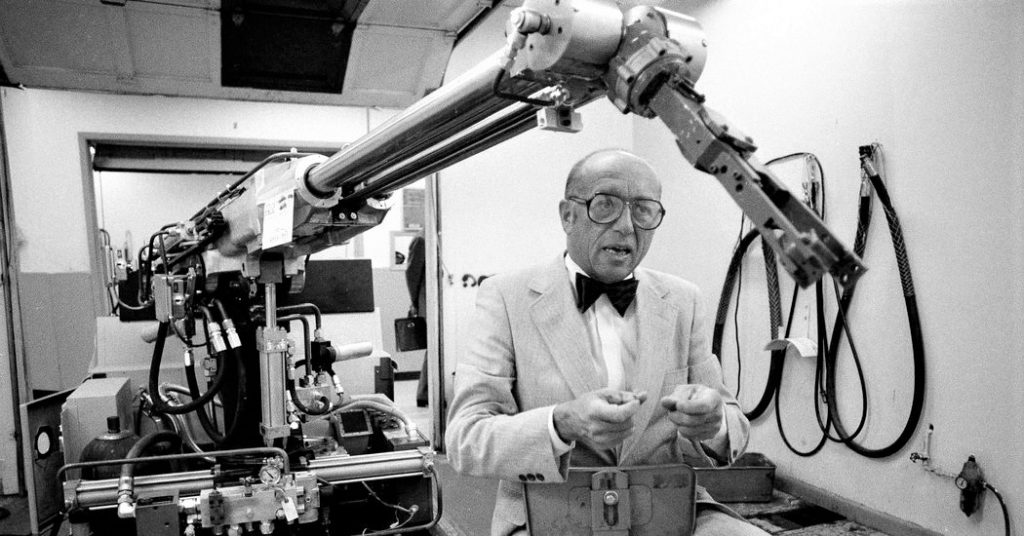
George Devol was born on 20th February 1912, known as the inventor of the robotics arm and the robotic door. He was an American inventor, known for creating the ultimate, the first industrial robot. Devol’s invention is also called the “Grandfather of Robotics”. The “National Inventors Hall of Fame” recognized him, “Devol’s patent for the first digitally operated programmable robotics arm represents the foundation of the modern robotics industry. [1]“
He was from an upper-middle-class family in Louisville, Kentucky. He got his early education from the Riordan Prep School. After completing school education, he went to a Cine-phone company where he got admission to the higher school in the year 1932. In the United Cinephone company, he did work for making the new sound pictures [1].`
Cinephone Company:
George Devol worked in a company of CinePhone, where his work was of the “talkies”. However, he later learned that the companies like RCA and Western Electric worked in the area and left the product. While he was working at their developed the patented industrial lightning and invent the automatic open door [1].
World War II:
In 1939, Devol applied for a patent for vicinity controls for clothing press machines, in view of a radio recurrence field. This control would consequently open and close clothing squeezes when laborers moved toward the machines. When the war started, Devol was prompted by the patent office that his patent application would require to briefly wait for the conflict.

Around the time World War II started, Devol sold his advantage in United Cinephone and moved toward Sperry Gyroscope to check whether they were keen on his thoughts on radar innovation. He held by Sperry as an administrator of the Special Projects Department that created radar gadgets and microwave test equipment.
Later in the war, he moved toward Auto-Ordnance Company regarding items that the organization could deliver besides their essential product offering, which were Thompson submachine firearms. Devol disclosed to them that the field of radar counter-measures was going to arise as a desperately required protection innovation [1].
General Electronics Industries:
In 1943, he coordinated General Electronics Industries in Greenwich, Connecticut, as an auxiliary of the Auto-Ordnance Corporation. General Electronics created counter-radar gadgets until the finish of the War. General Electronics was perhaps the biggest maker of radar and radar counter-measure gear for the U.S. Naval force, U.S. Armed force Air Force and other government offices. The organization’s radar counter-measure frameworks were on associated planes on D-Day.

Over a distinction of assessment regarding the fate of specific undertakings, Devol left Auto Ordinance and joined RCA. After a brief spell as eastern project lead of hardware items, which he felt “wasn’t his wad of wax”, Devol left RCA to create thoughts that in the end prompted the patent application for the main mechanical robot. In 1946 he applied for a patent on an attractive chronicle framework for controlling machines and an advanced playback gadget for machines.
Devol was essential for the group that built up the principal business utilization of microwave innovation, the Speedy Weeny, which consequently cooked and apportioned wieners in spots, for example, Grand Central Terminal [2].
Authorization of the Industry:
In the mid-1950s, Devol allowed his advanced attractive account gadget to Remington Rand of Norwalk, CT, and became supervisor of their magnetics office. There he worked with a group to build up his attractive account framework for business information applications. He likewise took a shot at building up the primary rapid printing frameworks. While the attractive chronicle framework showed excessively delayed for business information, Devol’s creation re-purposed as a machine control that would ultimately turn into the “cerebrums” of the Unimate robot [2].
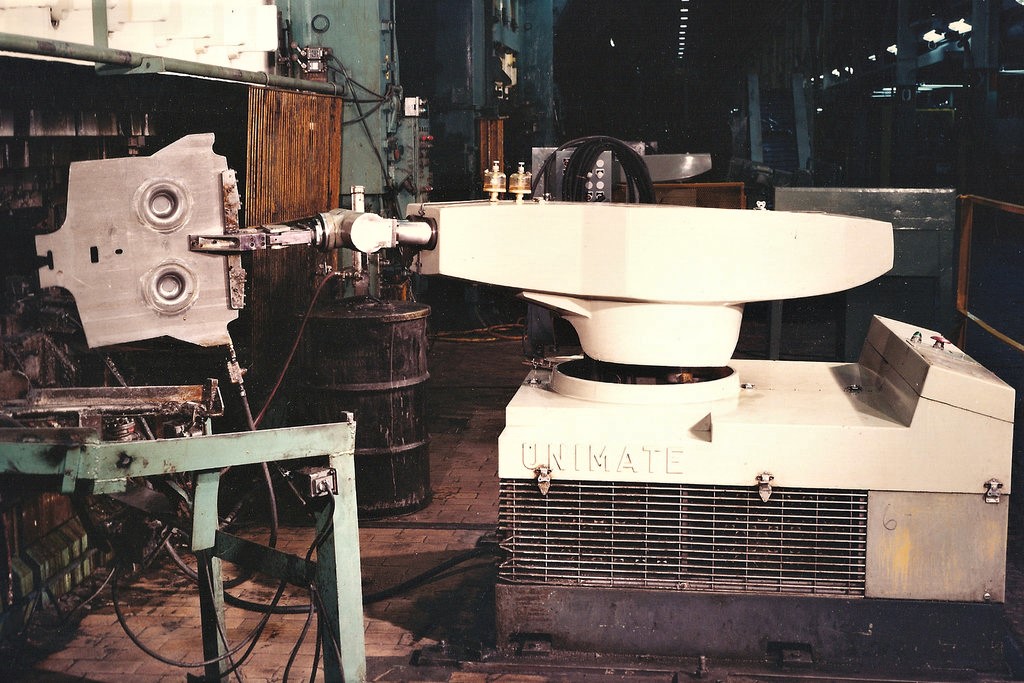
The First Ultimate Arm “UNIMATE”:
At a mixed drink party in 1956, Joseph Engelberger met designer George Devol, and the two got to discussing George’s most recent innovation – his Programmed Article Transfer gadget. “Sounds like a robot to me,” shouted Engelberger, who had a profound interest in robots because of his affection for author Isaac Asimov’s sci-fi stories.
In 1957, Engelberger, who at the time was head of merged Controls Corp. (Condec auxiliary) in Bethel, Connecticut, persuaded Condec’s CEO to fund the advancement of Devol’s development. After just about two years of being developed, Engel Berger and Devol created a model [2].
The animate arrangement in the year 1900:
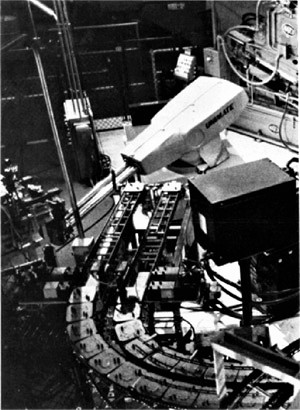
By 1961, the Unimate 1900 arrangement turned into the primary mass-created mechanical arm for industrial facility computerization.
Aware of the daunting struggle he would look from makers, and spurred by Asimov’s Three Laws of Robotics that relate a “first do no mischief” theory like the Hippocratic Oath, Engelberger zeroed in on utilizing the robots in undertakings unsafe to people. His procedure worked and in 1959 the 2,700-pound Unimate #001 model introduced on a mechanical production system unexpectedly at a General Motors die-casting plant in Trenton, New Jersey. By 1961, the Unimate 1900 arrangement turned into the primary mass delivered mechanical arm for plant computerization. In a brief timeframe, around 450 Unimate mechanical arms were used in die casting [2].
Condec Corp. organization:
In 1961 Engelberger set up Unimation, Inc., a Condec Corp. organization in Danbury, Connecticut, to build up the business in the recently settled advanced mechanics industry he made. That very year, Engelberger acquainted the Unimate 1900 with the general population at a career expo at Chicago’s Cow Palace. In 1966, TV crowds the world over saw the robot unexpectedly as Johnny Carson invited the Unimate on the Tonight Show. In this live transmission from NBC Studios in New York City, Engelberger had the robot play out a few stunts to wow watchers, including thumping a golf ball into a cup, pouring a larger, and leading the Tonight Show band [2].
Authorization of Nokia in Finland:
By 1966, Engelberger looked to widen the client base outside of the United States. He allowed Nokia of Finland to make the robots in Scandinavia and Eastern Europe. After an encouragement to address 400 Japanese heads in Tokyo who were keen on advanced mechanics for assembling, Engelberger consented to an allowing arrangement in 1969 with Kawasaki Heavy Industries (presently Kawasaki Robotics) to produce and market the Unimate robots for the Asian market.
On this side of the lake, General Motors had bounced in front of its opposition to turn into the most computerized car plant on the planet. In 1969, it revamped its Lordstown, Ohio plant introducing Unimate spot welding robots. Equipped for creation speed at no other time accomplished, the robots manufactured 110 vehicles for each hour – more than twofold the pace of any car plant in presence at that point! With the help of Unimate, GM reformed the car business.

The Europeans rushed to take action accordingly and organizations like BMW, Volvo, Mercedes Benz, British Leyland, and Fiat introduced Unimate mechanical arms to perform occupations that were disagreeable and perilous for people, a robot advantage imperative to Engelberger.
From a two-dimensional attraction to a modern and cultural upheaval, the Unimate robot stays one of the major commitments in the previous 100 years not exclusively to assembling however to development. It has left a living inheritance in an industry to which it conceived an offspring. Because of the Unimate, the field of mechanical technology keeps on extending past assembling to essentially every feature of human life and administration [2].
History of Robots:
“Robot” evokes an assortment of pictures, from R2D2 and C3PO of Star Wars notoriety; to human-like machines that exist to serve their makers (maybe as the cooking and cleaning Rosie in the mainstream animation arrangement the Jetsons); to the Rover Sojourner, which investigated the Martian scene as a feature of the Mars Pathfinder mission.
A few people may then again see robots as hazardous mechanical endeavors that will sometimes prompt the death of humanity, either by outfoxing or out-muscling us and assuming control over the world or by transforming us into totally innovative subordinate creatures who inactively sit by and program robots to do the entirety of our work. Indeed, the main utilization of “robot” happened in a play about mechanical men that are worked to deal with industrial facility sequential construction systems and that oppose their human bosses. These machines in R.U.R. (Rossum’s Universal Robots), composed by Czech dramatist Karel Capek in 1921, got their name from the Czech word for a slave [3].
Robotics:

“Robotics” likewise begotten by an essayist. Russian-conceived American sci-fi essayist Isaac Asimov previously used the word in 1942 in his short story “Runabout.” Asimov had a lot more splendid and more hopeful assessment of the robot’s function in human culture than did Capek. He mostly described the robots in his short stories as accommodating workers of man and saw robots as “a superior, cleaner race.” Asimov additionally proposed three “Laws of Robotics” that his robots, just as science fiction automated characters of many stories, followed:
Law One:
A robot may not harm an individual or, through inaction, permit a person to come to hurt.
Law Two:
A robot must comply with the requests given it by people aside from where such requests would strife with the First Law.
Law Three:
A robot must secure its reality, as long assurance doesn’t struggle with the First or Second Law [3].
Early Conceptions of Robots:
One of the main occurrences of a mechanical gadget worked to routinely do a specific actual undertaking happened around 3000 B.C. Egyptian water tickers used human puppets to strike the hour ringers. In 400 B.C., Archytas of Tarentum, designer of the pulley and the screw. Additionally imagined a wooden pigeon that could fly. Using pressurized water worked sculptures that could talk, motion, and prescience usually developed in Hellenic Egypt during the second century B.C.

In the primary century A.D., Petronius Arbiter made a doll that could move like a person. Giovanni Torriani made a wooden robot that could bring the Emperor’s day by day bread from the store in 1557. Mechanical innovations arrived at a relative top (before the twentieth century) during the 1700s; innumerable ingenious, yet illogical, automata (for example robots) made during this time-frame.
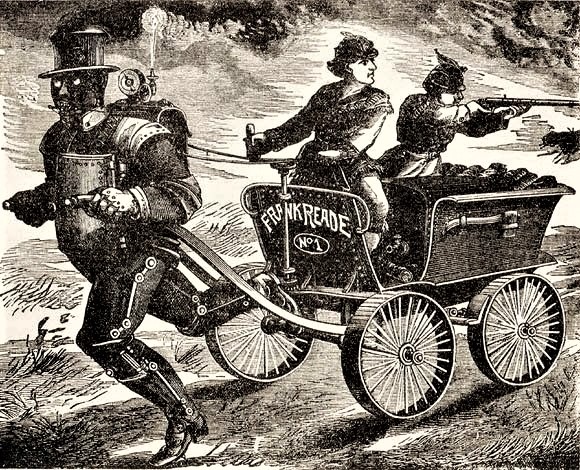
The nineteenth century likewise loaded up with new mechanical manifestations. For example, a talking doll by Edison and a steam-fueled robot by Canadians. Although these creations since forever may have planted the main seeds of motivation for the innovative robot, the logical advancement made in the twentieth century in mechanical technology outperforms past headways a thousandfold [3].
The principal current robots:
The most punctual robots as we probably are aware they made in the mid-1950s by George C. Devol, a creator from Louisville, Kentucky. He concocted and protected a re-programmable controller called “Unimate,” from “Widespread Automation”. For the following decade, he endeavored to sell his item in the business, however didn’t succeed. In the last part of the 1960s, financial specialist/engineer Joseph Engelberger gained Devol’s robot patent and had the option to alter it into a modern robot and structure an organization called Unimation to deliver and showcase the robots. For his endeavors and victories, Engelberger referred to in the business as “the Father of Robotics“.
The scholarly community likewise gained a lot of ground in creating new robots. In 1958 at the Stanford Research Institute, Charles Rosen drove an examination group in building up a robot called “Shakey.” Shakey was unmistakably further developed than the first Unimate, which was intended for specific, modern applications. Shakey could wheel around the room, notice the scene with his TV “eyes,” move across new environmental factors, and specifically, react to his current circumstance. He gave his name because of his shaky and banging developments [3].
The Victorian Robots:
The Industrial Revolution and the expanded spotlight on arithmetic, designing, and science in England in the Victorian age added to the energy towards genuinely advanced mechanics. Charles Babbage (1791-1871) attempted to build up the establishments of software engineering early to the mid-nineteenth century, his best undertakings being the distinction motor and the investigative motor. Albeit never finished because of an absence of assets, these two machines spread out the rudiments for mechanical computations. Others, for example, Ada Lovelace perceived the future chance of PCs making pictures or playing music.
Automata kept on giving diversion during the nineteenth century, yet coterminous with this period was the advancement of steam-controlled machines and motors that assisted with making fabricating substantially more proficient and speedier. Processing plants used machines to either build outstanding tasks at hand or accuracy in creating many items [4].
The 20th Century to today:
During the 1950s, George Devol planned the Unimate, an automated arm gadget that moved pass on castings in a General Motors plant in New Jersey, which began work in 1961. Unimation, the organization Devol established with automated business person Joseph Engelberger, was the principal robot producing organization.
The robot initially observed as an anomaly. During the 1950s, the German firm KUKA built up a mechanized welding line for apparatuses just as a multi-spot-welding line for Volkswagen. By 1968, Kawasaki had allowed a Unimation plan of a water-powered robot and had assembled them. In 1969, GM had accomplished 90% of body welds using Unimates in one of its plants. In 1970, Stanford University built up the supposed Standard Arm, as it is as yet known today, used for minor parts gathering and merging contact and weight criticism.
Robotics Welding in 1973s:
Robotized welding was to turn into the critical utilization of mechanical robots as the machines could create great welds in unfriendly conditions. KUKA , by 1973, had presented the six-hub arm, which would turn into an industry standard. This was about the very time that completely electric robots started showing up. Cincinnati Milacron presented a microcomputer-controlled modern robot for business use in the exact year. As the seventies moved by, the decade saw many firsts: an all-electric microchip-controlled robot, a high accuracy addition robot, higher payloads, a sensor-based welding robot, the PUMA robot for little parts gathering, improvement of the Selectively Compliant (SCARA) arm, and the change from pressure driven to electric engine drives in spot welding robots [4].
At the point when 1980 showed up, so too did an exhibit of machine vision at the University of Rhode Island. GM would give three robots something to do the following year, arranging castings by machine vision. More advancement would pepper the decade: the improvement of a robot programming language, an immediate drive SCARA robot. Velocities and limits were going up, as well [4].
Robot Controls and Synchronization:
The 1990s got developments robot controls and synchronization just as the main bundling robot, which stacked pretzels. A patent late in the decade added laser controlling legitimately on the robotics arm [4].
The accomplishments of NASA’s automated meanderers Spirit and Opportunity flabbergasted many in 2003 investigating the outside of Mars. 2004 saw the synchronization of four robots and a sum of 38 tomahawks cooperating. The following year, a remote train pendant made educating a robot more secure. Steps proceeded in a lightweight, payload limits, and reach speeds, and multi-hub synchronization.
Robots went to work in homes in 2003 with the presentation of the Roomba automated vacuum. By 2009 the improvement of self-governing modern vehicles was well in progress, and by the beginning of the following decade, automated arms were getting portable in the mechanical space. The year 2013 saw the presentation of shared robots, or COBOTS, intended to work next to each other with human laborers. By the following year, AMRs, or Autonomous Mobile Robots, were effectively grinding away in distribution centers. In 2015, Omron Electronics purchased Adept Technologies, whose roots follow back to Unimation, the main robot organization. Comparative large purchases would occur during the rest of the decade.
Throughout the last 50 years, robots have discovered a spot in different circles, as toys and amusement, military weapons, search and salvage collaborators, and many original positions. As programming and innovation improve, robots discover their way into many positions that in the past have been excessively hazardous, dull, or unthinkable for people to accomplish [4].
Summary:
This article presented a brief history and knowledge about robots and robotics. The robots changed our lives and the living style of all human beings. This article has deep knowledge about the inventor of a robot and the subject which created with the name of “micro-robotics”.
References:
1. 19th November 2020; Available from: wikipedia
2. 19th November 2020; Available from: robotics
3. 19th November 2020; Available from: cs.stanford
4. 19th November 2020; Available from: thomasnet